
Special Classes of Propositions (cont.)
Let’s pause at this point and get a better sense of how our special classes of propositions are structured and how they relate to propositions in general. We can do this by recruiting our visual imaginations and drawing up a sufficient budget of venn diagrams for each family of propositions. The case for 3 variables is exemplary enough for a start.
Linear Propositions
The linear propositions, 

One thing to keep in mind about these sums is that the values in 

In a universe of discourse based on three boolean variables, 


At the top is the venn diagram for the linear proposition of rank 3, which may be expressed by any one of the following three forms.

Next are the venn diagrams for the three linear propositions of rank 2, which may be expressed by the following three forms, respectively.

Next are the three linear propositions of rank 1, which are none other than the three basic propositions,

At the bottom is the linear proposition of rank 0, the everywhere false proposition or the constant 


Resources
cc: Academia.edu • Cybernetics • Structural Modeling • Systems Science
cc: Conceptual Graphs • Laws of Form • Mathstodon • Research Gate
 contains a number of smaller classes deserving of special attention.
contains a number of smaller classes deserving of special attention.![[a_1, \ldots, a_n]](https://s0.wp.com/latex.php?latex=%5Ba_1%2C+%5Cldots%2C+a_n%5D&bg=ffffff&fg=000000&s=0&c=20201002) is one of the propositions in the set
is one of the propositions in the set  There are of course exactly
There are of course exactly  of these. Depending on context, basic propositions may also be called coordinate propositions or simple propositions.
of these. Depending on context, basic propositions may also be called coordinate propositions or simple propositions. propositions in
propositions in  propositions each which take on special forms with respect to the basis
propositions each which take on special forms with respect to the basis  and falls into
and falls into  ranks, with a binomial coefficient
ranks, with a binomial coefficient  giving the number of propositions having rank or weight
giving the number of propositions having rank or weight  in their class.
in their class. may be written as products:
may be written as products:
 may be written as products:
may be written as products:
 in the resulting expression. For example, when
in the resulting expression. For example, when  the linear proposition of rank
the linear proposition of rank  the positive proposition of rank
the positive proposition of rank  and the singular proposition of rank
and the singular proposition of rank 
 are both linear and positive. So those two families of propositions, the linear and the positive, may be viewed as two different ways of generalizing the class of basic propositions.
are both linear and positive. So those two families of propositions, the linear and the positive, may be viewed as two different ways of generalizing the class of basic propositions. A singular proposition with respect to the basis
A singular proposition with respect to the basis  will not remain singular if
will not remain singular if  to pick out a new basis, the sets of linear propositions and positive propositions are both determined by the choice of basic propositions, and that entire determination is tantamount to the purely conventional choice of a cell as origin.
to pick out a new basis, the sets of linear propositions and positive propositions are both determined by the choice of basic propositions, and that entire determination is tantamount to the purely conventional choice of a cell as origin.![A^\bullet = [a_1, \ldots, a_n]](https://s0.wp.com/latex.php?latex=A%5E%5Cbullet+%3D+%5Ba_1%2C+%5Cldots%2C+a_n%5D&bg=ffffff&fg=000000&s=0&c=20201002) qualified by the logical features
qualified by the logical features  plus the set of all functions from the space
plus the set of all functions from the space  There are
There are  often pictured as the cells of a venn diagram or the nodes of a hypercube. There are
often pictured as the cells of a venn diagram or the nodes of a hypercube. There are  accordingly pictured as all the ways of painting the cells of a venn diagram or the nodes of a hypercube with a palette of two colors.
accordingly pictured as all the ways of painting the cells of a venn diagram or the nodes of a hypercube with a palette of two colors. or
or  The analogy between logical propositions and boolean-valued functions is close enough to adopt the latter as models of the former and simply refer to the functions
The analogy between logical propositions and boolean-valued functions is close enough to adopt the latter as models of the former and simply refer to the functions  The signs are interpreted as denoting logical features, for example, properties of objects in the universe of discourse or simple propositions about those objects. Corresponding to the alphabet
The signs are interpreted as denoting logical features, for example, properties of objects in the universe of discourse or simple propositions about those objects. Corresponding to the alphabet  there is then a set of logical features,
there is then a set of logical features,  affords a basis for generating an
affords a basis for generating an ![A^\bullet = [ \mathcal{A} ] = [ a_1, \ldots, a_n ].](https://s0.wp.com/latex.php?latex=A%5E%5Cbullet+%3D+%5B+%5Cmathcal%7BA%7D+%5D+%3D+%5B+a_1%2C+%5Cldots%2C+a_n+%5D.&bg=ffffff&fg=000000&s=0&c=20201002) It is useful to consider a universe of discourse as a categorical object incorporating both the set of points
It is useful to consider a universe of discourse as a categorical object incorporating both the set of points  and the set of propositions
and the set of propositions  implicit with the ordinary picture of a venn diagram on
implicit with the ordinary picture of a venn diagram on  may be regarded as an ordered pair
may be regarded as an ordered pair  bearing the type
bearing the type  which type designation may be abbreviated as
which type designation may be abbreviated as  or even more succinctly as
or even more succinctly as ![[ \mathbb{B}^n ].](https://s0.wp.com/latex.php?latex=%5B+%5Cmathbb%7BB%7D%5En+%5D.&bg=ffffff&fg=000000&s=0&c=20201002) For convenience, the data type of a finite set on
For convenience, the data type of a finite set on ![[n]](https://s0.wp.com/latex.php?latex=%5Bn%5D&bg=ffffff&fg=000000&s=0&c=20201002) or
or 


 is taken to mean exactly one of the propositions
is taken to mean exactly one of the propositions  is false, in other words, their
is false, in other words, their  is taken to mean every one of the propositions
is taken to mean every one of the propositions 

 or barred parentheses
or barred parentheses  may be used for logical operators.
may be used for logical operators. or
or  in formal languages, where it forms the identity element for concatenation. It may be given visible expression in textual settings by means of the logically equivalent form
in formal languages, where it forms the identity element for concatenation. It may be given visible expression in textual settings by means of the logically equivalent form  or, especially if operating in an algebraic context, by a simple
or, especially if operating in an algebraic context, by a simple  Also when working in an algebraic mode, the plus sign
Also when working in an algebraic mode, the plus sign  may be used for
may be used for ![\begin{matrix} x + y ~=~ \texttt{(} x \texttt{,} y \texttt{)} \\[6pt] x + y + z ~=~ \texttt{((} x \texttt{,} y \texttt{),} z \texttt{)} ~=~ \texttt{(} x \texttt{,(} y \texttt{,} z \texttt{))} \end{matrix}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Bmatrix%7D++x+%2B+y+%7E%3D%7E+%5Ctexttt%7B%28%7D+x+%5Ctexttt%7B%2C%7D+y+%5Ctexttt%7B%29%7D++%5C%5C%5B6pt%5D++x+%2B+y+%2B+z+%7E%3D%7E+%5Ctexttt%7B%28%28%7D+x+%5Ctexttt%7B%2C%7D+y+%5Ctexttt%7B%29%2C%7D+z+%5Ctexttt%7B%29%7D+%7E%3D%7E+%5Ctexttt%7B%28%7D+x+%5Ctexttt%7B%2C%28%7D+y+%5Ctexttt%7B%2C%7D+z+%5Ctexttt%7B%29%29%7D++%5Cend%7Bmatrix%7D&bg=ffffff&fg=000000&s=0&c=20201002)

 its meaning in practice.
its meaning in practice.
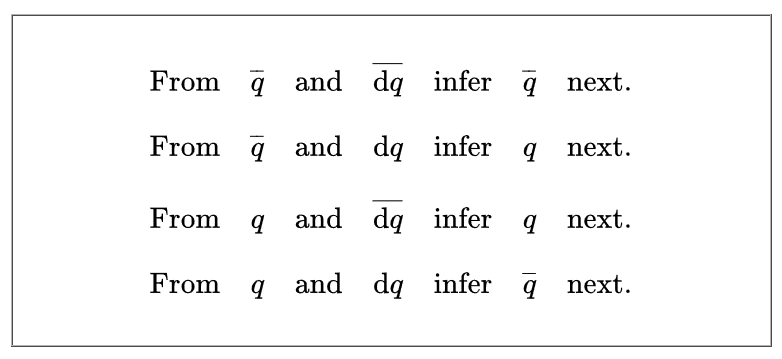
 is interpreted as applying to an object in the universe of discourse
is interpreted as applying to an object in the universe of discourse  then the differential feature
then the differential feature 
 will be true in the next moment of observation. Taken all together we have the fourfold scheme of inference shown above.
will be true in the next moment of observation. Taken all together we have the fourfold scheme of inference shown above. while the corresponding terms of description could be extended to an alphabet of two symbols
while the corresponding terms of description could be extended to an alphabet of two symbols 

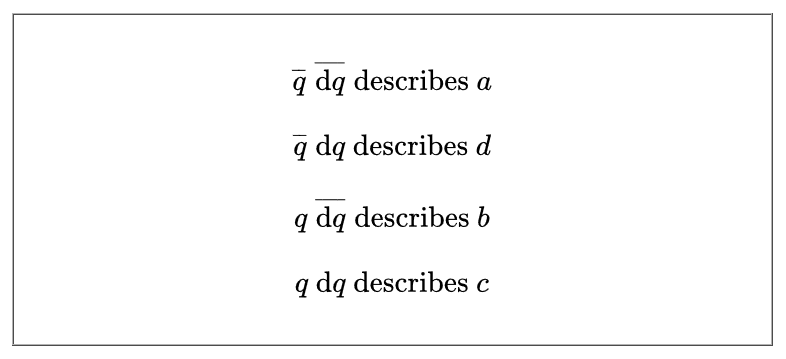


 is marked as a differential quality on account of its absence or presence qualifying the absence or presence of change occurring in another quality. As with any quality, it is represented in the venn diagram by means of a “circle” distinguishing two halves of the universe of discourse, in this case, the portions of
is marked as a differential quality on account of its absence or presence qualifying the absence or presence of change occurring in another quality. As with any quality, it is represented in the venn diagram by means of a “circle” distinguishing two halves of the universe of discourse, in this case, the portions of 
 together with a basis of discussion
together with a basis of discussion  for expressing propositions about the contents of that universe. Once the quality
for expressing propositions about the contents of that universe. Once the quality  we have the basis for a formal language specifically cut out for discussing
we have the basis for a formal language specifically cut out for discussing 
 there are just four distinct pieces of information which can be expressed in the corresponding propositional calculus, namely, the constant proposition
there are just four distinct pieces of information which can be expressed in the corresponding propositional calculus, namely, the constant proposition  the negative proposition
the negative proposition  the positive proposition
the positive proposition  and the constant proposition
and the constant proposition 
 holds of no points, the negative proposition
holds of no points, the negative proposition  and
and  the positive proposition
the positive proposition  and
and  and the constant proposition
and the constant proposition  holds of all points in the sample.
holds of all points in the sample. In corresponding fashion, the initial propositional calculus is extended by means of the enlarged alphabet,
In corresponding fashion, the initial propositional calculus is extended by means of the enlarged alphabet, 


 is outside the region
is outside the region  while the object
while the object  is inside the region
is inside the region 
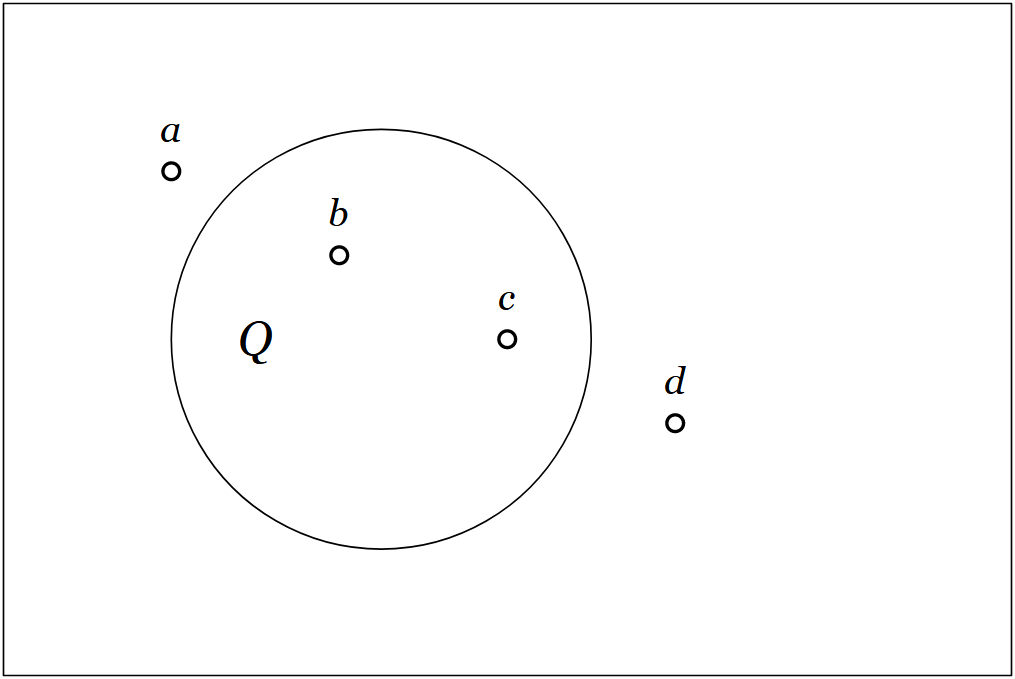

 The universe under discussion may be a population of individuals having various additional properties or it may be a collection of locations occupied by various individuals. The area of the “circle” represents the individuals with the property
The universe under discussion may be a population of individuals having various additional properties or it may be a collection of locations occupied by various individuals. The area of the “circle” represents the individuals with the property  are singled out by name. As it happens,
are singled out by name. As it happens, 